
-
-
-
Технологии Сервис

-

Методы фильтрации сигналов датчиков: как устранить шум и повысить точность и стабильность выходных данных
Время выхода:
2025-04-16
Источник:
В областях умного дома, промышленной автоматизации и медицинского оборудования датчики служат своеобразными "чувствительными нервами", в режиме реального времени фиксируя такие физические величины, как температура, давление и движение. Но сталкивались ли вы с такой проблемой: данные датчиков то высоки, то низки, а иногда даже появляются явные ошибки? Зачастую это вызвано шумом, смешанным с сигналом. Как с помощью техники фильтрации "очистить" сигнал и повысить стабильность вывода? В этой статье будет подробно рассмотрены принципы, методы и практические приемы фильтрации сигналов датчиков, которые помогут вам освоить эту ключевую технологию.
I. Зачем нужна фильтрация сигналов датчиков?
1. Откуда берется шум?
На сигнал датчика в процессе сбора и передачи влияют различные помехи:
Влияние окружающей среды :Электромагнитное излучение (например, от мобильных телефонов), колебания напряжения, изменения температуры.
Механические помехи :Вибрации, трение, удары.
Шум в цепи :Тепловой шум усилителя, ошибка квантования АЦП, плохой контакт.
Этот шум приводит к искажению формы сигнала, возникновению случайных колебаний или пиков. Например:
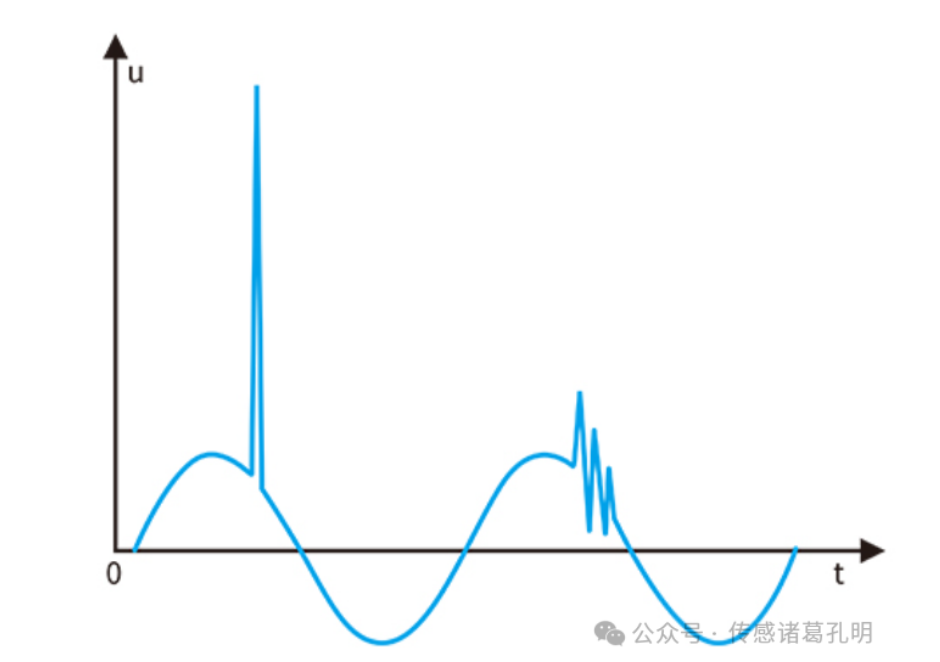
Температурный датчик рядом с электродвигателем подвергается электромагнитным помехам, показания скачут на ±2℃.
В выходном сигнале акселерометра из-за механических вибраций появляются высокочастотные выбросы.
2. Основная цель фильтрации
Разделение полезного сигнала и шума :Отделить полезный сигнал от шума.
Повышение отношения сигнал/шум (SNR) :Сделать данные более приближенными к реальным значениям.
Обеспечение стабильности системы :Предотвращение ложных срабатываний из-за шума (например, ложных тревог, ошибок в управляющих командах).
II. Принципы фильтрации: от "сита" к "алгоритму"
1. Сущность фильтрации
Суть фильтрации заключается в избирательном ослаблении или подавлении составляющих шума на основе различий в частоте, амплитуде или статистических характеристиках сигнала и шума.
Пример со звуком :
Если шум представляет собой высокочастотное гудение (например, шум от электрического тока), можно использовать фильтр нижних частот, чтобы "блокировать" высокочастотную часть и сохранить человеческий голос.
Если шум представляет собой низкочастотную вибрацию (например, гул машины), то для удаления низкочастотных помех используется фильтр высоких частот.
2. Частотная и временная области: два подхода к анализу

Частотная фильтрация :Преобразование сигнала в частотные составляющие (преобразование Фурье), "удаление" частотных диапазонов шума на спектре.
Временная фильтрация :Прямая обработка временных рядов данных, сглаживание формы сигнала с помощью скользящего среднего, взвешенных вычислений и т.д.
III. Четыре основных типа классических фильтров и области их применения
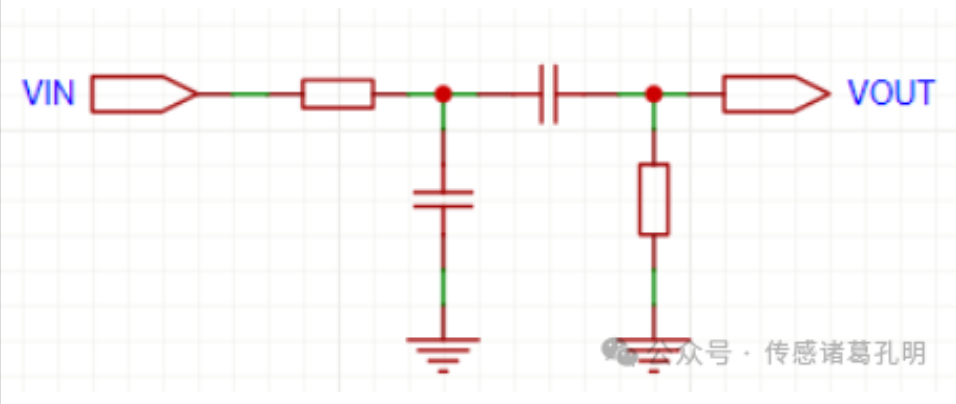
1. Фильтр нижних частот (Low Pass Filter, LPF)
Принцип :Пропускание сигналов низких частот, подавление высокочастотных составляющих.
Реализация (фильтр нижних частот RC первого порядка): в реальной схеме может быть реализован с помощью R и C, ниже приведена типичная схема фильтра нижних частот.

Области применения :
Удаление высокочастотных электромагнитных помех с датчика температуры.
Сглаживание импульсных сигналов датчика сердечного ритма.
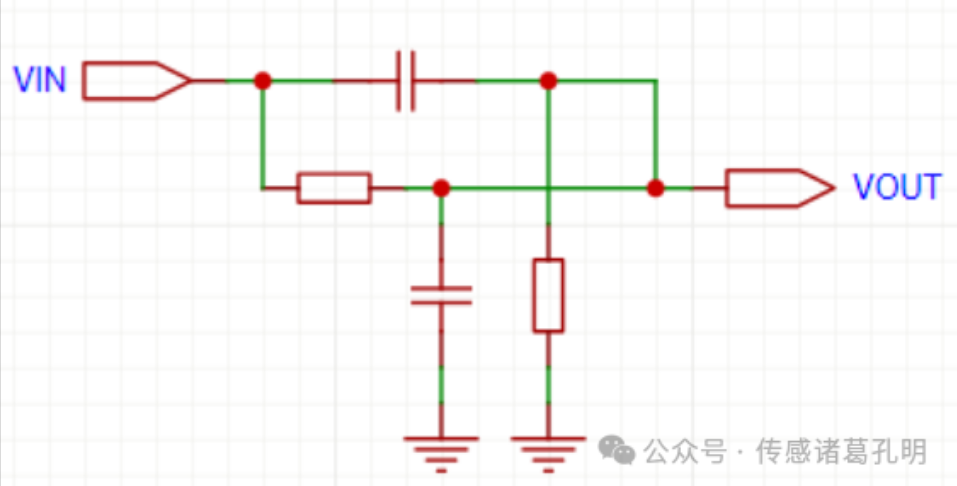
2. Фильтр верхних частот (High Pass Filter, HPF)
Принцип :Пропускание сигналов высоких частот, подавление низкочастотных составляющих.
Реализация: может быть реализован с помощью схемы CR, C блокирует низкочастотные сигналы, ниже приведена типичная схема фильтра высоких частот.
Области применения :
Устранение дрейфа базовой линии акселерометра (например, влияние силы тяжести).
Выделение деталей согласных в речевом сигнале.
3. Полосовой фильтр (Band Pass Filter, BPF)
Принцип :Сохранение только сигналов в определенном частотном диапазоне.
Реализация: последовательное соединение фильтров нижних и верхних частот.
Области применения :
Извлечение сигналов определенного канала в беспроводной связи.
Разделение альфа-волн (8-13 Гц) или бета-волн (14-30 Гц) в электроэнцефалограмме (ЭЭГ).
4. Режекторный фильтр (Band Stop Filter, BSF)
Принцип :Блокировка сигналов в определенном частотном диапазоне (например, "заградительный фильтр").
Реализация: параллельное соединение фильтров нижних и верхних частот.
Области применения :
Устранение помех промышленной частоты 50/60 Гц (например, сетевой шум в электрокардиограмме).
Подавление механического резонансного шума на определенной частоте.
IV. Цифровая фильтрация: от теории к реализации кода
С распространением микропроцессоров цифровая фильтрация стала ведущей технологией. Ее суть заключается в дискретизации непрерывного сигнала и обработке потока данных в реальном времени с помощью алгоритмов.
1. Фильтр скользящего среднего (Moving Average Filter)
Принцип :Вычисление среднего арифметического значения последних N точек данных.
Пример кода (Python) :

Достоинства и недостатки :
Достоинства: простота вычислений, подходит для обработки в реальном времени.
Недостатки: запаздывание реакции на скачкообразные сигналы, неспособность подавить высокочастотный шум.
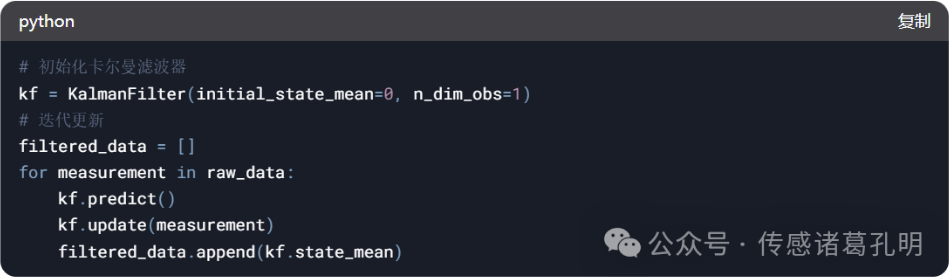
2. Фильтр Калмана (Kalman Filter)
Принцип Основан на модели состояния, динамически предсказывает и корректирует сигнал.
Области применения :
Слияние данных датчиков ориентации беспилотника (акселерометр + гироскоп).
Сглаживание траектории GPS.
Структура кода :
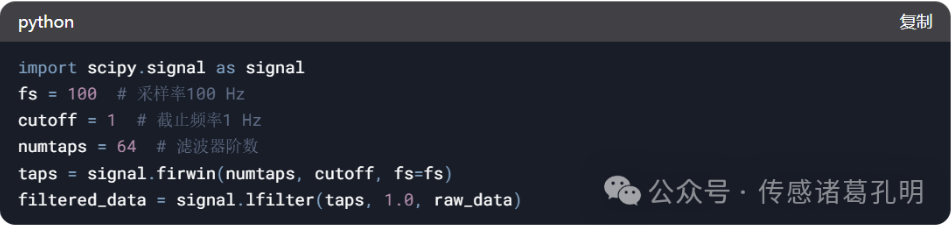
3. Фильтр с конечной импульсной характеристикой (FIR Filter)
Принцип Выполняет свертку входного сигнала с весовыми коэффициентами конечной длины.
Инструменты проектирования Использование MATLAB fir1 функции или Python scipy.signal.firwin。
Пример Проектирование НЧ-фильтра FIR с частотой среза 1 Гц:
4. Фильтр с бесконечной импульсной характеристикой (IIR Filter)
Принцип Использует структуру обратной связи для достижения более крутой характеристики частотного отклика.
Общие типы Фильтры Баттерворта (Butterworth), Чебышева (Chebyshev), эллиптические (Elliptic).
Пример проектирования (НЧ-фильтр Баттерворта) :
V. Практические советы: как выбрать параметры фильтрации?
1. Частота среза: не всегда чем ниже, тем лучше!
Метод определения :
Анализ спектра сигнала (FFT), определение максимальной частоты полезного сигнала
2. Порядок фильтра: баланс производительности и вычислительных затрат
Чем выше порядок, тем круче переходная полоса, но тем больше вычислительная задержка и потребление ресурсов.
Эмпирические значения :
Скользящее среднее: длина окна 5-20 точек.
IIR-фильтр: 4-8 порядков.
3. Фильтрация с нулевой фазой: устранение проблемы сдвига по времени
Метод Использование filtfilt функции (фильтрация в прямом и обратном направлении).
Цена Введение искажений на краях данных, необходим резервный буфер.
VI. Примеры применения: как методы фильтрации решают реальные задачи?
Пример 1: подавление шума промышленного датчика давления
Проблема Сигнал давления в гидравлической системе подвержен помехам от вибрации насоса, колебания в диапазоне ±10%.
Решение :
Анализ спектра показал, что шум сосредоточен в диапазоне 50-100 Гц.
Проектирование 6-порядкового IIR-фильтра с полосой задерживания, центральная частота 75 Гц, ширина полосы 30 Гц.
После фильтрации в реальном времени диапазон колебаний снизился до ±1%.
Пример 2: оптимизация измерения частоты сердечных сокращений в умных браслетах
Проблема Во время тренировки миоэлектрический шум приводит к ошибочному обнаружению частоты сердечных сокращений.
Решение :
Основная составляющая сигнала частоты сердечных сокращений находится в диапазоне 0,5-4 Гц (30-240 ударов в минуту).
Применен полосовой FIR-фильтр (0,5-4 Гц) для подавления высокочастотного шума.
В сочетании со скользящим средним фильтром сглаживает выходную форму волны.
VII. Новые тенденции в технологии фильтрации: ИИ и адаптивная фильтрация
1. Адаптивные фильтры (алгоритмы LMS/RLS)
Принцип Динамически настраивают коэффициенты фильтра для отслеживания изменений шума.
Применение :
Подавление окружающего шума в наушниках с шумоподавлением в реальном времени.
Удаление дыхательных помех в электрокардиограмме (ЭКГ).
2. Фильтрация с использованием глубокого обучения
Метод Обучение нейронной сети (например, CNN, LSTM) для прямого извлечения признаков из зашумленных данных.
Преимущества Может обрабатывать нестационарный шум и нелинейные помехи.
Проблемы Требуется большое количество помеченных данных, высокие требования к вычислительным ресурсам.
VIII. Заключение и рекомендации
1. Процесс проектирования фильтра
Шаг 1 Определение характеристик сигнала и типа шума (спектральный анализ).
Шаг 2 Выбор типа фильтра (LPF/HPF/IIR/FIR).
Шаг 3 Проверка моделирования (MATLAB/Python).
Шаг 4 Аппаратная реализация (FPGA/встраиваемый код).
2. Советы по предотвращению ошибок
Избегайте чрезмерной фильтрации Чрезмерное сглаживание может привести к потере деталей сигнала.
Обращайте внимание на фазовый сдвиг В системах реального времени отдавайте предпочтение фильтрам с нулевой или минимальной фазой.
Регулярная калибровка При изменении условий эксплуатации переоцените параметры фильтра.
3. Рекомендованные инструменты
Инструменты моделирования MATLAB (Filter Design Toolbox), Python (SciPy, PyTorch).
Аппаратные платформы Arduino (простая фильтрация), STM32 (реальное время IIR/FIR), FPGA (высокоскоростная обработка).
Заключение
Фильтрация сигналов датчиков — это и наука, и искусство. От классического метода скользящего среднего до передовых AI-фильтров — технический прогресс позволяет нам точнее получать данные из реального мира. Для инженеров и любителей владение методами фильтрации — это ключ к "отсеиванию лишнего".
本文转载自-传感诸葛孔明
Ключевые слова:
Предыдущая страница
Связанные Новости
Седло SMP: Ваш идеальный спутник для комфортных поездок
Узнайте, как седло SMP может изменить ваши велопоездки и сделать их более комфортными.
Погружение в мир SMP Minecraft: новости, советы и тренды
Узнайте все о SMP Minecraft: новости, советы и актуальные тренды в мире игр.
Датчик давления: секреты, скрытые за технологиями
Понимание принципов работы датчиков давления, областей их применения и перспектив развития: погружение в мир технологий.
Телефон
Техническая поддержка
Поддержка продаж
Адрес
B6-401 индустриального парка искусственного интеллекта нового поколения, № 176 Biyuan 2-я дорога, район высоких технологий, Сиань
Сообщение онлайн
Все права защищены©2024 Сиань Сенсер Датчик Лтд
Оставить заявку:Контакты
Телефон:0086-029-81106070
Europe & Oceania:export@xian-sensors.com
Asia & Amercia:selina@xian-sensors.com
Whatsapp:18092690661